Rozwiązania i Komponenty dla AutomatykiSolutions and Components for Automation
Samojezdny robot mobilny MOBOT® MW FlatRunner 5 służy do automatyzacji transportu wewnętrznego.
Jego zadaniem jest autonomiczny transport towarów pomiędzy wyznaczonymi punktami.
Robot ma bardzo kompaktową konstrukcję o wysokości zaledwie 22 cm.
Idealnie sprawdzi się do przewożenia ciężkich ładunków takich jak palety, duże paczki czy niewymiarowe detale.
 czas pracy do 5 h na jednym ładowaniu
czas pracy do 5 h na jednym ładowaniu| Model robota | MOBOT® MW FlatRunner 5 |
| Ładowność i sposób transportu ładunku | |
| Sposób transportu ładunku | Mocowanie ładunku na górnej powierzchni robota za pomocą 4 śrub M8 lub z wykorzystaniem systemu unoszenia ładunku* *unoszenie ładunku na wysokość 70 mm (umożliwia uniesienie ładunku sięgającego do podłoża ponad skanery nawigacyjne i bezpieczeństwa) |
| Dopuszczalna łączna masa ładunku* | 500 kg |
| Zasilanie | |
| Złącze ręcznego ładowania akumulatorów | TAK (44 V DC, max. 20 A) |
| Złącze automatycznego ładowania akumulatorów | Stykowe złącze montowane na spodzie robota pozwala na automatyczne doładowywanie akumulatorów w trakcie pracy |
| Zasilanie robota | Akumulator Li-Ion 2 x 32 Ah/ 48 V |
| Ładowanie | - Ładowarka 20 A/ 48 V podłączana ręcznie - Opcjonalny moduł styków do ładowania automatycznego |
| Czas pracy przy pełnym obciążeniu | ~5 h |
| Czas pracy w stanie gotowości | ~40 h |
| Czas ładowania baterii | ~ 3,5 h |
| Prędkość i osiągi | |
| Prędkość maksymalna | 3,5 km/h |
| Moc nominalna | 2400 W |
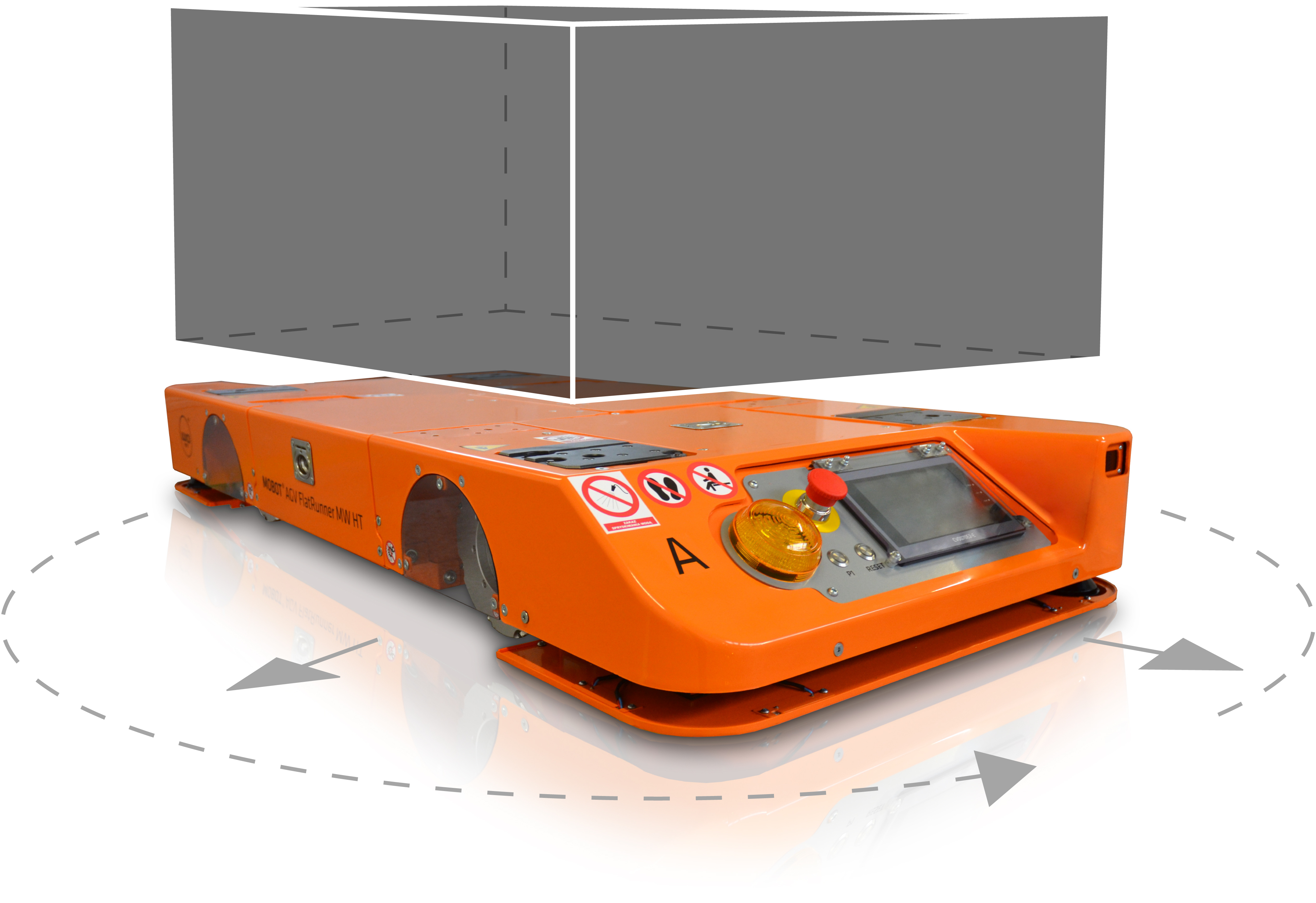
| Kierunek ruchu | Możliwość jazdy we wszystkick kierunkach, dzięki kołom Mecanum |
| Promień skrętu | Możliwość obracania się w miejscu |
| Maksymalny poziom nachylenia powierzchni | Ograniczony poprzez dopuszczalny kąt natarcia robota |
| Nawigacja | |
| Nawigacja | Nawigacja naturalna i inteligentna za pomocą systemu LMS* |
| Komunikacja | |
| Komunikacja | Wi-Fi 2,4 GHz, opcjonalnie przemysłowy moduł radiowy 2,4 GHz (RS232) |
| Złącze komunikacyjne | - Ethernet RJ45 - komunikacja z PC, MODBUS TCP/IP - Złącze 18 pin, E-Stopx2, Reset, RS485 (Modbus RTU), CANopen, 2 x wej., wyjście zasilające 24 VDC (2A) + wyjście zasilające mocy 24 VDC (10 A) |
| Napęd i sterowanie | |
| Napęd | 4 x silnik serwo (bezszczotkowy), koła o średnicy 203,2 mm |
| Kontrola i sterowanie |
|
| Czujniki | |
| Czujniki |
|
| Sygnalizacja | - 2 x sygnalizator świetlny i dźwiękowy |
| Środowisko | |
| Zakres temperatur pracy | 5 - 45 °C |
| Zakres wilgotności | < 80 %, bez kondensacji |
| Stopień ochrony | IP30 |
| Natężenie światła zewnętrznego | < 1500 lx |
| Wymiary i masa | |
| Wymiary (Dł. x Sz. x Wy.) | 1600 x 710 x 220 mm |
| Masa całkowita (z akumulatorami) | ~200 kg |
Robot MW FlatRunner 5 wyposażony jest w specjalne koła Mecanum, umożliwiające ruch w dowolnym kierunku i wykonywanie obrotów o 360 stopni.
Doskonała zwrotność skraca czas cykli i przestojów procesu produkcyjnego.
Nieograniczona mobilność i elastyczność wdrożenia tego rozwiązania znacząco zwiększa możliwości zastosowania robota mobilnego.
Roboty MOBOT® MW mogą pracować w rozmaitych aplikacjach od prostych, aż po bardzo złożone.
Poniżej najpopularniejsze przykłady organizacji ruchu robotów mobilnych.
MOBOT® MW FlatRunner 5 jest wyposażony w zaawansowany system bezpieczeństwa, na który składaja się m.in. skanery laserowe z funkcją bezpieczeństwa. Odpowiadają one za detekcję przeszkód pojawiających się przed robotem mobilnym.
Dzięki ich działaniu robot mobilny może odpowiednio reagować zwalniając, całkowicie się zatrzymując lub omijajac przeszkodę (jeśli pozwala na to miejsce na trasie), aby uniknąć kolizji.
Do robota proponujemy kilka modeli standardowych wózków i adapterów. Możesz doposażyć go w moduł z automatycznymi rolkami, adapter do transportu palet, układ podnoszenia ładunku czy zamocować ramię zrobotyzowane na robocie.
Za ich pomocą możliwe jest automatyczne zabranie ładunku, jego bezpieczny transport i odstawienie w miejsce docelowe.
Oprócz standardowych rozwiązań oferujemy również wykonanie wózka dopasowanego do potrzeb Twojej fabryki.
Robot może być opcjonalnie wyposażony w system automatycznego pobierania i odstawiania ładunku - o wymiarach palety. System pozwala na unoszenie ładunku na wysokość 70 mm.
Do nawigacji MW FlatRunner 5 stosowany jest system laserowego mapowania terenu (LMS) oraz linii kolorowej. Typ AMR / AGV.
Nawigacja LMS to tzw. free navigation, wykorzystująca naturalnie występujące obiekty do orientacji w przestrzeni, podobnie do człowieka.
Robot tworzy mapę otoczenia w swojej pamięci i skanując przestrzeń podczas jazdy widzi punkty charakterystyczne (np. ściany), dzięki czemu zawsze dokładnie wie gdzie jest.
Zarządzanie pracą robota odbywa się z poziomu terminalu sterującego, umieszczonego w punkcie bazowym.
Do szczegółowej konfiguracji parametrów robota służy intuicyjne oprogramowanie MOBOT® RoutePlanner.

Korzyści:
Jesteś zainteresowany ofertą? A może chcesz zadać pytanie naszemu doradcy?
Zadzwoń +48 61 22 27 422 lub napisz do nasnapisz do nas
.jpg)



