Rozwiązania i Komponenty dla AutomatykiSolutions and Components for Automation
The MOBOT ® AGV FlatRunner MW HT self-propelled mobile robot is used to automate internal transport.
Its task is autonomous transport of goods between designated points.
It is ideal for transporting heavy loads such as pallets, large packages or undersized details.
 working time up to 5 hours on one charge
working time up to 5 hours on one charge load capacity up to 700 kg
load capacity up to 700 kg| Robot type | MOBOT® AGV FlatRunner MW HT |
| Payload and transport method | |
| Transport method | Fastening the load on the upper surface of the robot with 4 M8 screws or using the load lifting system * raising the load to a height of 70 mm (allows lifting the load reaching the ground above navigation and safety scanners) |
| Permissible total weight of the cart with load | 700 kg |
| Power supply | |
| Manual battery charging connector | YES (44 V DC, max. 20 A) |
| Automatic battery charging connector | A contact connector mounted on the bottom of the robot enables automatic battery charging during operation |
| Robot power supply | 2x 32 Ah Li-Ion battery / 48 V |
| Charger | - 20 A / 48 V charger connected manually - Optional contact module for automatic charging |
| Operating time at full load | ~5 h |
| Operating time in standby mode | ~40 h |
| Battery charging time | ~ 3,5 h |
| Speed and performance | |
| Maximal speed | 3,5 km/h |
| Nominal power | 2400 W |
| Movement directions | Possibility of riding in all directions thanks to Mecanum wheels |
| Turning radius | Possibility of turning in place |
| Maximum surface slope | Robot designed for driving on a flat surface |
| Navigation | |
| Navigation | Natural and intelligent navigation using the LMS * |
| Communication | |
| Communication | 2.4 GHz Wi-Fi, optional 2.4 GHz industrial radio module (RS232) |
| Connector | - Ethernet RJ45 - communication with PC, MODBUS TCP / IP - 18 pin connector, E-Stopx2, Reset, RS485 (Modbus RTU), CANopen, 2 x input, 24 VDC power supply output (2A) + 24 VDC power supply output (10 A) |
| Drive and control | |
| Drive | 4x BLDC servo motor, wheels diameter 203,2 mm |
| Control and steering | - 1 x 7 “touch operator panel |
| Sensors | |
| Sensors | - 2 x vision system for tracking the line |
| Signaling | - 2 x light and sound signaling devices |
| Environment | |
| Operating temperature range | 5 - 45 °C |
| Humidity range | < 80 %, no condensation |
| Protection degree | IP30 |
| The intensity of external light | < 1500 lx |
| Dimensions and weight | |
| Dimensions (L x W x H) | 1500 x 700 x 220 mm |
| Total weight (with batteries) | ~200 kg |
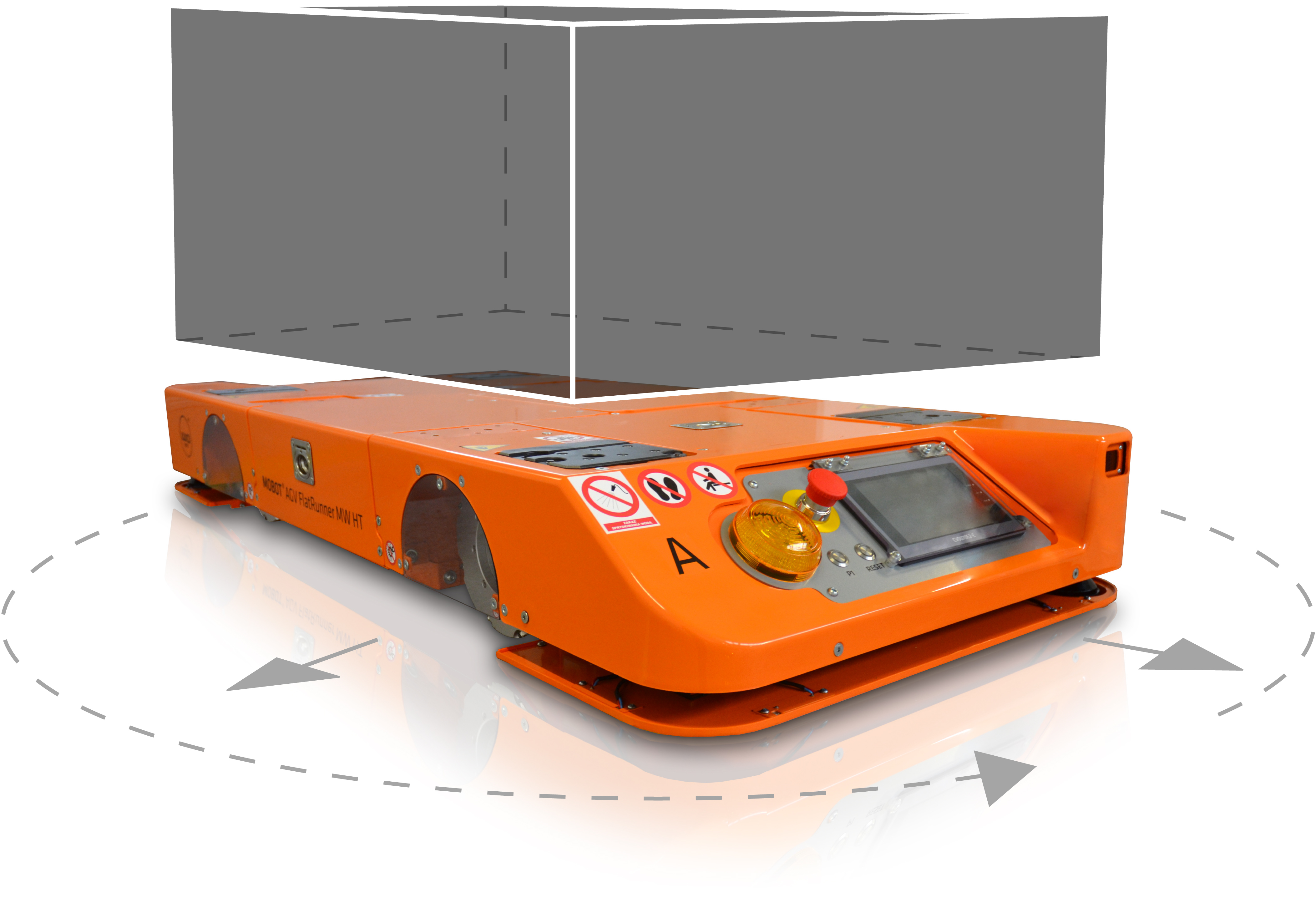
The FlatRunner MW HT robot is equipped with special Mecanum wheels, enabling movement in any direction and making 360-degree rotations.
Excellent maneuverability reduces cycle times and production downtime.
Unlimited mobility and flexibility of implementing this solution significantly increases the possibilities of using a mobile robot.
MOBOT ® AGV MW robots can work in a variety of applications from simple to very complex.
Below are the most popular examples of mobile robot movement organization.
MOBOT ® AGV FlatRunner MW HT is equipped with an advanced security system, including laser scanners with security function. They are responsible for detection of obstacles appearing before the mobile robot.
Thanks to their operation, the mobile robot can react appropriately by slowing down, stopping completely or bypassing an obstacle (if the place on the route allows it) to avoid collision.
We offer several models of standard carts and adapters for the robot. You can upgrade it with an automatic roller module, pallet transport adapter, load lifting system or attach a robotic arm to a robot.
With their help, it is possible to automatically take the load, transport it safely and store it in its destination.
In addition to standard solutions, we also offer a trolley tailored to the needs of your factory.
The robot can be optionally equipped with an automatic load pick-up and drop-off system - with the dimensions of a pallet. The system allows you to lift a load to a height of 70 mm.
The FlatRunner MW HT navigation system uses a laser terrain mapping system (LMS) and color line.
navigation LMS to tzw. free navigation, wykorzystująca naturalnie występujące obiekty do orientacji w przestrzeni, podobnie do człowieka.
The robot creates a map of the environment in its memory and, by scanning the space while traveling, sees landmarks (e.g. walls), so that it always knows exactly where it is.
Robot operation is managed from the level of the control terminal located in the base point.
The detailed configuration of robot parameters is done using the intuitive MOBOT ® RoutePlanner software.

Benefits
Are you interested in our offer? Do you want to ask a question to our adviser?
Call +48 61 22 27 422 or use the contact formuse the contact form
.jpg)



