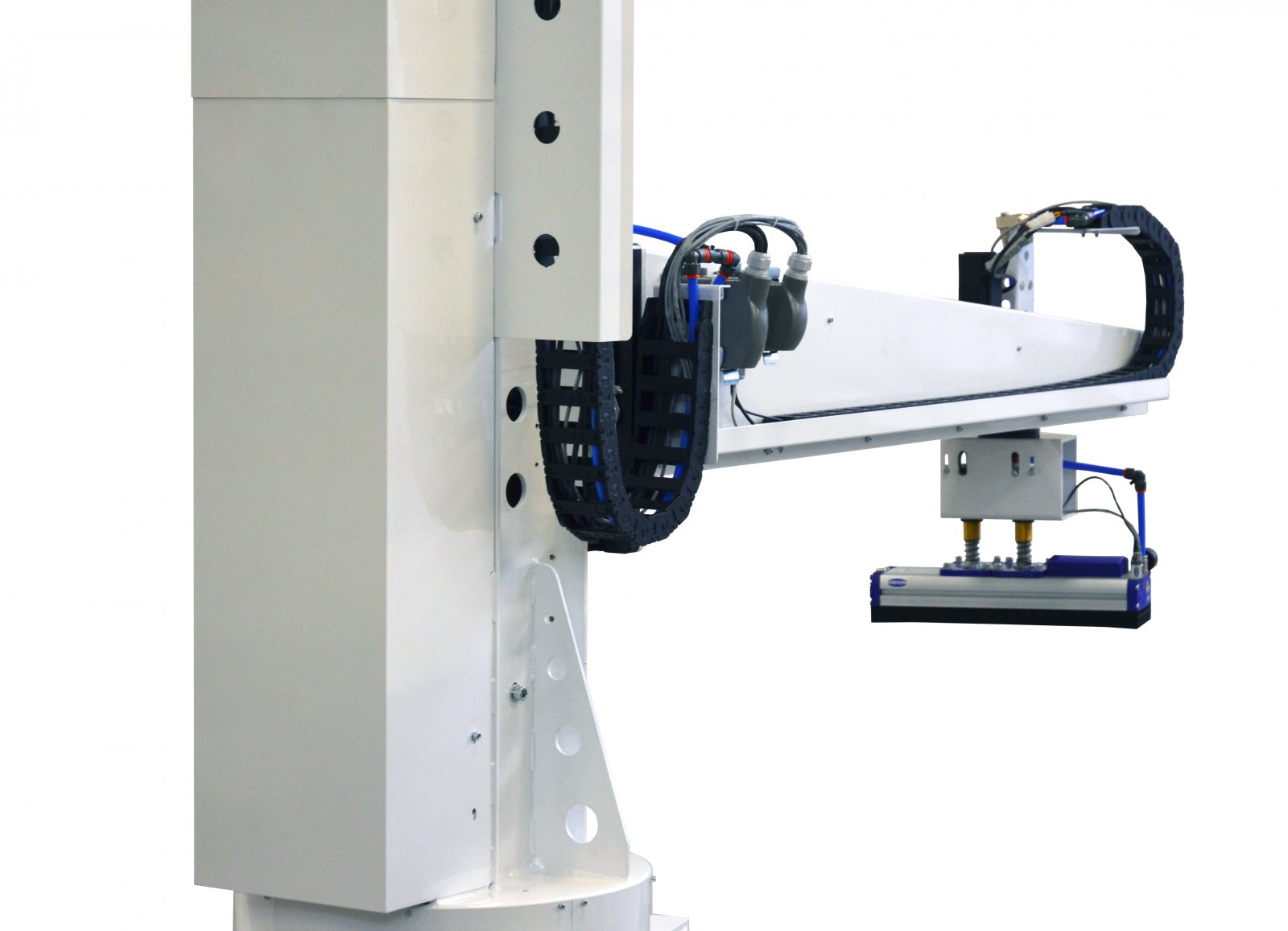
Robot Tower TR1200 przeznaczony jest do aplikacji pakowania lub paletyzacji. Posiada 4 stopnie swobody, pozwalające na efektywną realizację złożonego ruchu.
Ramię robota pozwala na zamontowanie dowolnego chwytaka, istnieje także możliwość zastosowania wymiennika chwytaków, umożliwiającego szybkie przezbrojenie robota w trybie ręcznym lub automatycznym.
Robot może przenosić ładunki o łącznej masie do 100 kg, przy maksymalnym zasięgu 1200 mm. W przenoszonej masie należy również uwzględnić wagę chwytaka zastosowanego w aplikacji.
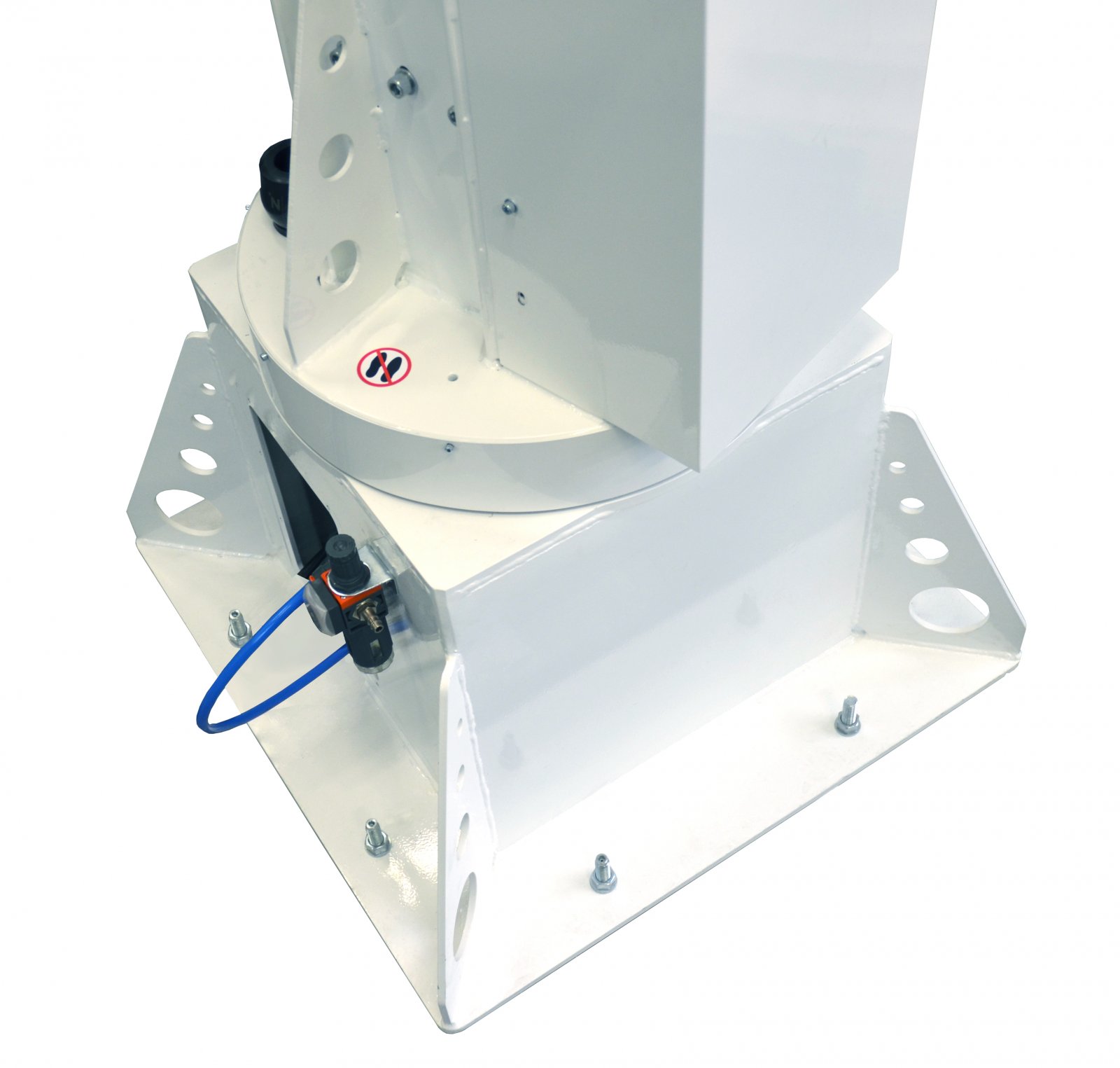
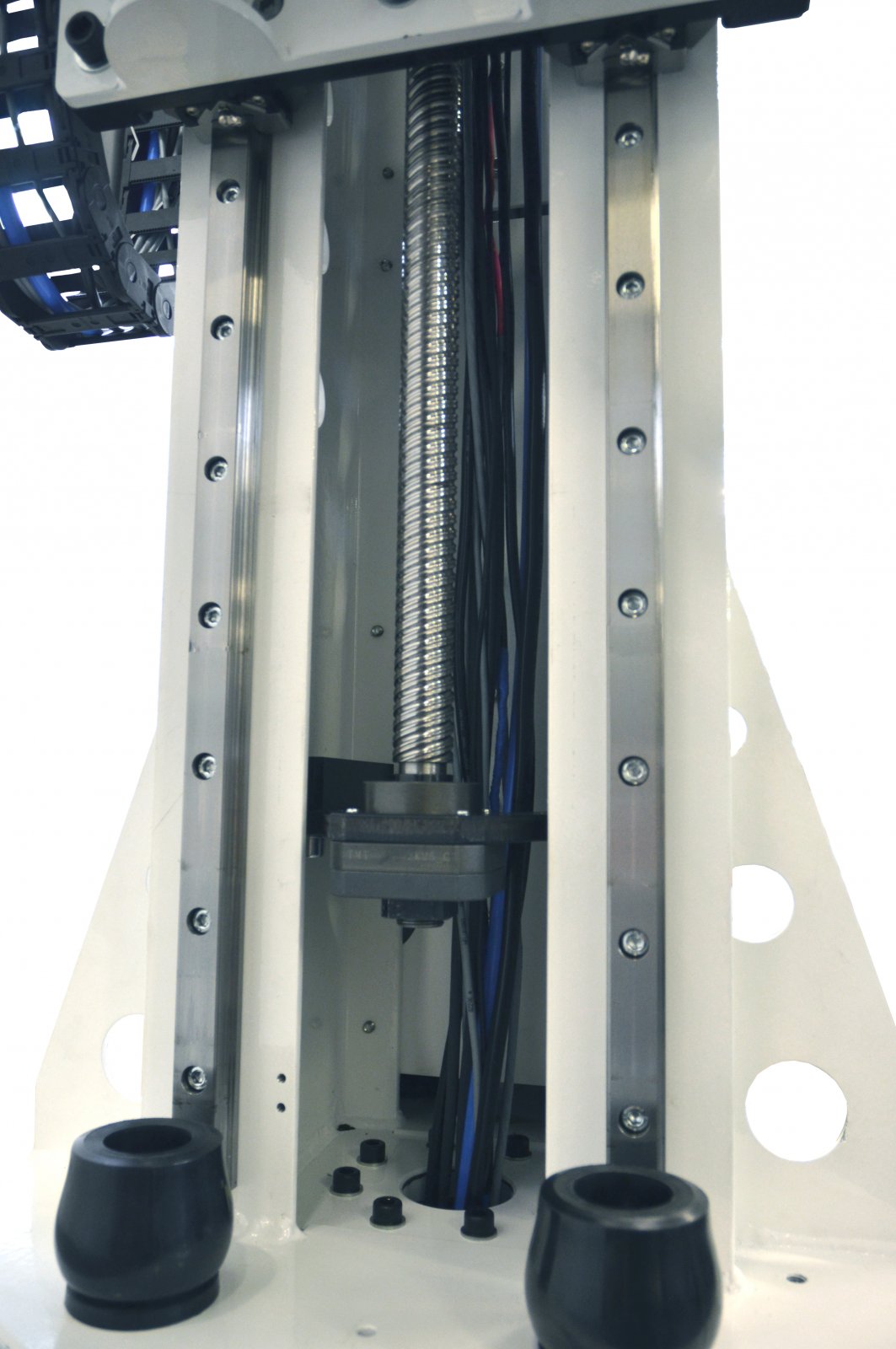
Dzięki zastosowaniu przekładni z otworem w poszczególnych osiach obrotu, wszelkie przewody prowadzone są wewnątrz konstrukcji. Pionowa oś robota może być dodatkowo zabezpieczona za pomocą osłony harmonijkowej przed dostępem zanieczyszczeń.
Konstrukcja robota może być przystosowana do posadowienia jej na układzie układzie jezdnym, opartym o prowadnice liniowe oraz napęd wysokoprecyzyjnej listwy zębatej. Dzięki temu robot zyskuje dodatkową oś ruchu, wzdłuż której może przemieszczać się z ładunkiem, na niemalże dowolnym dystansie.
Robot może zostać dodatkowo wyposażony w różnorodne czujniki lub system wizyjny, przekazujący informację o lokalizacji lub orientacji obiektu, który ma zostać przetransportowany.
Sterowanie robota umieszczone jest w oddzielnej szafie sterującej. Robot jest programowany z wykorzystaniem środowiska instalowanego na komputerze klasy PC, z systemem Windows. Do kontrolera robota za pośrednictwem portu RS485 można podłączyć panel HMI i komunikować się z nim w protokole MODBUS-RTU.
Dane techniczne:
| Model robota | TR1200-1500-SVC(001) | |
| Rodzaj robota | Tower | |
| Ilość osi swobody | 4 | |
| Zakres roboczy | J0 | 340º |
| J1 | 1500 mm | |
| J2 | 1200 mm | |
| J3 | 720°* | |
| Maksymalna prędkość | J0 | 150° /s |
| J1 | 1000 mm/s | |
| J2 | 1000 mm/s | |
| J3 | 360°/s | |
| Rozdzielczość pozycjonowania | J0 | 0,1° |
| J1 | 0,01 mm | |
| J2 | 0,01 mm | |
| J3 | 0,1° | |
| Powtarzalność pozycjonowania | J0 | 0,1° |
| J1 | 0,05 mm | |
| J2 | 0,1 mm | |
| J3 | 0,1° | |
| Maksymalne obciążenie | 100 kg | |
| Kontroler robota | Dedykowany układ kontroli ruchu | |
| Sposób programowania | Za pośrednictwem komputera (RS232) | |
| Interfejs komunikacyjny | USB, RS485, uniwersalne We/Wy cyfrowe | |
| Zasilanie powietrzem | 4-5 barów | |
| Zasilanie | AC 380 V 50 Hz | |
| Temperatura pracy | 5-40°C | |
J0 - obrót w podstawie
J1 - oś pionowa
J2 - oś pozioma
J3 - obrót chwytaka
* - zależy od parametrów chwytaka