
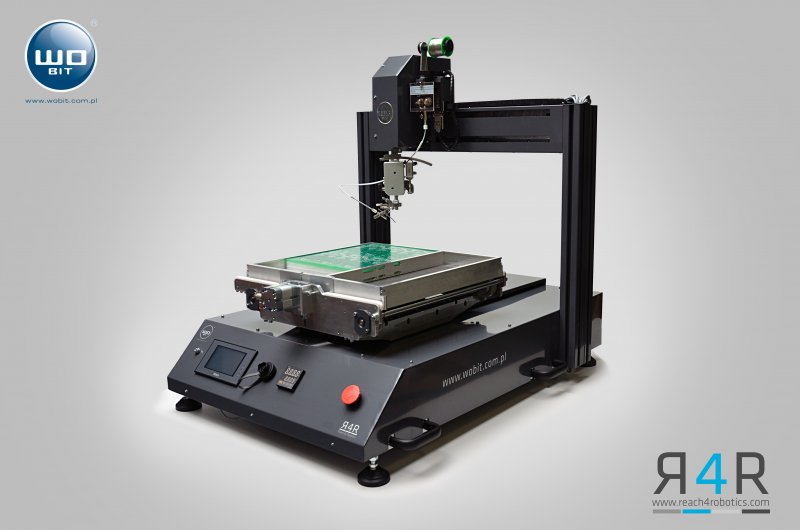
Podstawę robota stanowi platforma kartezjańska typu desktop, która umożliwia realizację przemieszczenia w 4 osiach (3 osie realizują ruch liniowy, jedna oś ruch obrotowy).
Robot przeznaczony jest do wykorzystania jako stanowisko samodzielne lub w linii technologicznej.
Nad pracą robota czuwa specjalnie zaprojektowany kontroler. Pozwala on na generowanie trajektorii ruchu wszystkich osi urządzenia oraz sterowanie innymi funkcjami realizowanego procesu.
W zależności od zastosowania robot może zostać doposażony w odpowiednie akcesoria umożliwiające realizację np. lutowania, wiercenia otworów czy też przenoszenia elementów z miejsca na miejsce.
Korzyści:
- Realizacja przemieszczenia w 4 osiach
- Atrakcyjna cena
- Kompaktowe rozmiary
- Wysoka precyzja działania
- Duże pole robocze
Zastosowania:
- Wkręcanie śrub
- Aplikacje dozujące
- Aplikacje pomiarowe
- Lutowanie
- Automatyczny montaż
Dane techniczne:
| Model robota | CDR480-STBS-S(01) | |
| Rodzaj robota | Desktop | |
| Ilość osi swobody | 4 | |
| Zakres roboczy | Oś X | 480 mm |
| Oś Y | 480 mm | |
| Oś Z | 100 mm | |
| Oś R | 340° | |
| Maksymalna prędkość | Oś X | 200 mm/s |
| Oś Y | 200 mm/s | |
| Oś Z | 110 mm/s | |
| Oś R | 340°/s | |
| Rozdzielczość pozycjonowania | Oś X | 0,006 mm |
| Oś Y | 0,006 mm | |
| Oś Z | 0,003 mm | |
| Oś R | 0,1° | |
| Powtarzalność pozycjonowania | Oś X | 0,05 mm |
| Oś Y | 0,05 mm | |
| Oś Z | 0,05 mm | |
| Oś R | 0,2° | |
| Maksymalne obciążenie | 10 kg | |
| Kontroler robota | Dedykowany układ kontroli ruchu | |
| Sposób programowania | Za pośrednictwem komputera | |
| Sposób wyboru programu | Wyświetlacz 4,3" lub zewnętrznie przez magistralę RS485 | |
| Interfejs komunikacyjny | USB, RS485, uniwersalne We/Wy cyfrowe | |
| Zakres regulacji temperatury | 50 - 500°C (plus tryb uśpienia) | |
| Urządzenie kontrolujące temperaturę | Dedykowany układ kontroli ze sprzężeniem zwrotnym | |
| Zasilanie powietrzem | 4-5 kg/cm2 | |
| Zasilanie | AC 230V 50Hz | |
| Temperatura pracy | 5-40°C | |
| Wymiary (WxSxD) | 855x713x935 mm | |
