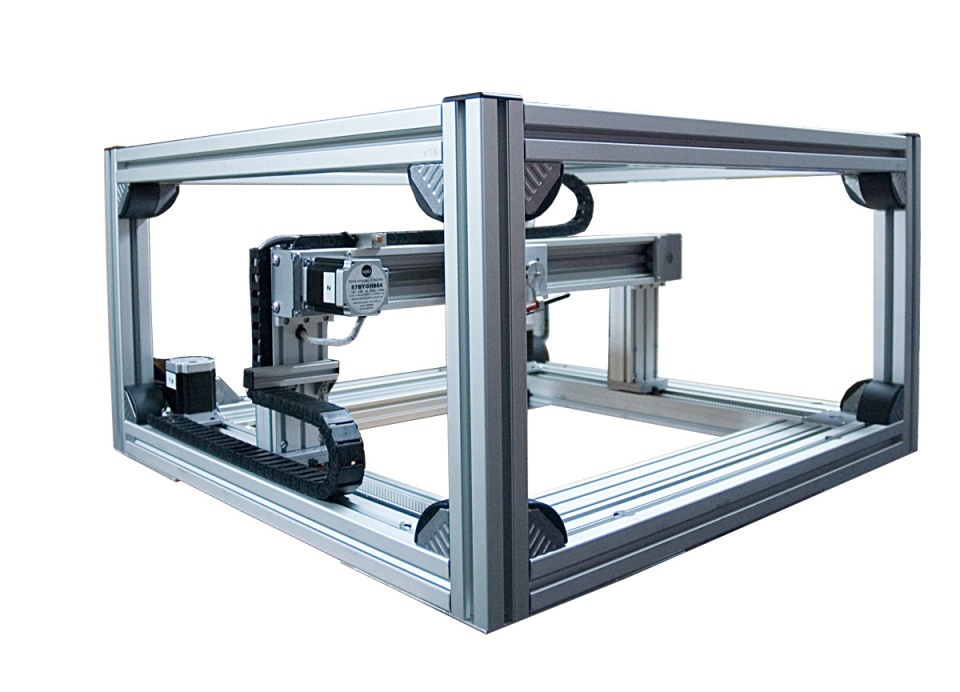
Najbardziej ekonomiczną wersją jest robot, którego konstrukcja bazuje na modułach MLA.
Jako napęd może być wykorzystany silnik krokowy, silnik szczotkowy i bezszczotkowy prądu stałego oraz serwonapęd.
Dzięki zgodności profilu z popularnymi systemami łączeniowymi i jak sama nazwa wskazuje budowie modułowej, MLA pozwalają konstruktorom na przygotowywanie funkcjonalnych rozwiązań, dopasowanych do wymagań konkretnej aplikacji. Pozwala to na wykonanie konstrukcji 2-osiowej, 3-osiowej oraz 4-osiowej robota kartezjańskiego.
Maksymalny zakres ruchu w jednej osi wynosi 2500 mm, a precyzja pozycjonowania wynosi do 0,1 mm.
Sterowanie silnikami może być realizowane w różnorodny sposób. Pierwszym z nich jest wykorzystanie modułów MLA ze zintegrowaną elektroniką, które mogą być kontrolowane nadrzędnie z poziomu sterownika PLC lub panelu HMI.
Zamiast sterownika PLC można zastosować również kontroler ruchu MIC488, a zamiast modułów ze zintegrowaną elektroniką wykorzystać moduły MLA-SIC. W zależności od funkcji robota może on zostać wyposażony w chwytaki lub różnorodne urządzenia pomiarowe jak np. skanery laserowe.
Właściwości:
- Precyzja pozycjonowania: do 0,1 mm
- Zakres ruchu w jednej osi: do 2500 mm
Zastosowania:
- Przenoszenie materiałów
- Aplikacje dozujące
- Aplikacje pick&place
- Aplikacje pakujące
- Automatyzacja procesów