The use of industrial robots and the automation of pick & place processes significantly increases the efficiency and effectiveness of manufacturing processes , also affects positively the quality of end products.
We often use Cartesian robots for robotization of pick&place processes, due to the modularity of structures and their easy adaptation to various applications.
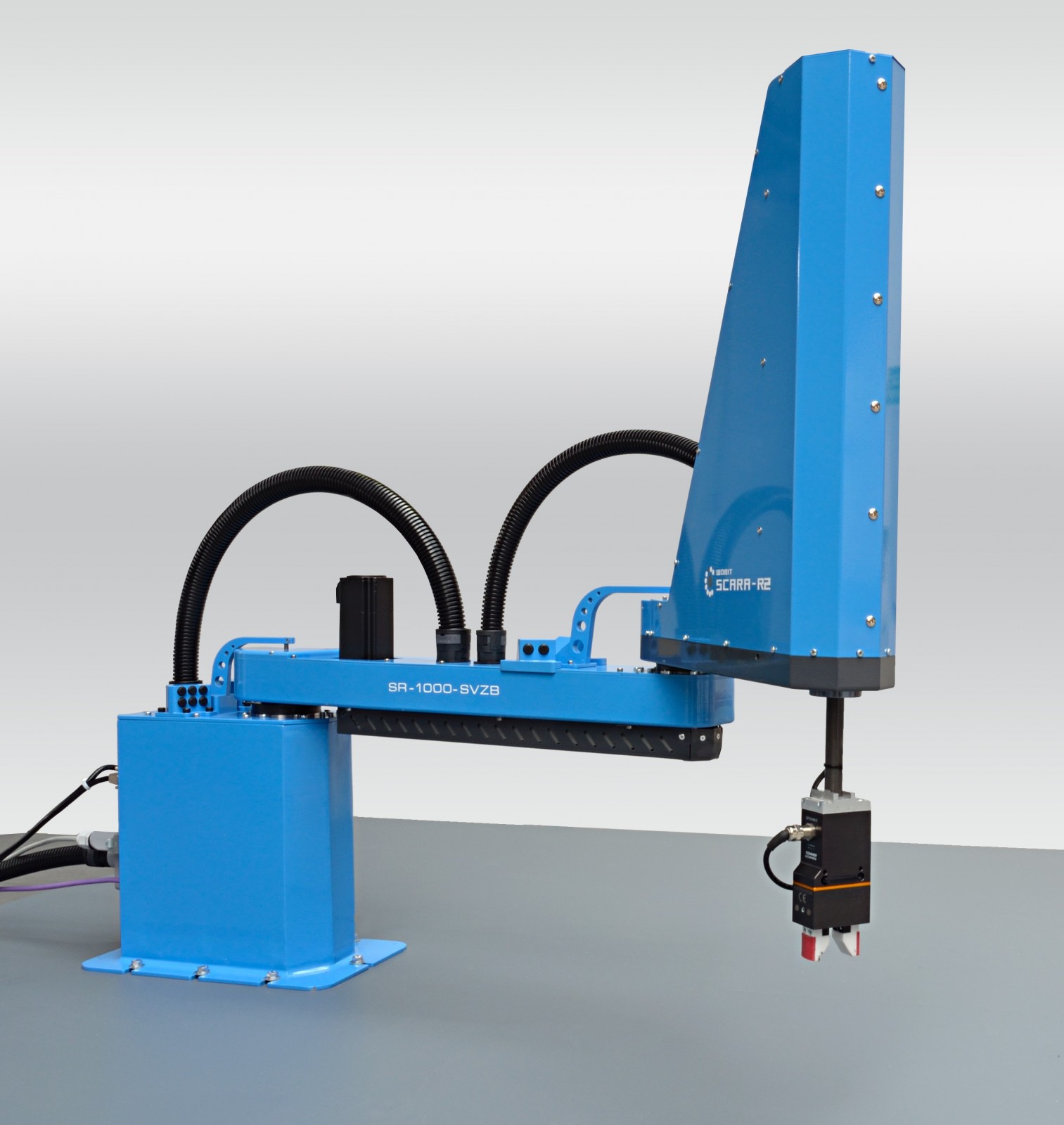
They are immediately followed by SCARA robots, which, despite the relatively small capacity, allow simultaneous support of several positions without the need to build them, as is the case with Cartesian constructions.
SCARA robots are also more flexible and are easier to adapt to other production processes.
The pick&place applications also work with small Tower robots (mainly the TR300 model) whose design allows high traffic speeds.
Due to the often unknown location of the objects on the conveyor belt, our robots are equipped with a measuring system such as a vision system that allows you to identify and check the details of the workpiece.
To choose the right solution, we take into account a number of elements such as cycle time, traffic range, lift capacity, communication protocols, control and programming possibilities expected by the customer.
The WObit Newsletter, which is a combi - nation of knowledge and new pill for active clients.
We respect your right to privacy and we protect your personal information. Your e-mail will serve us only to inform you about product novelties, events in which we will take part and participate, competitions, social actions in which we will engage, share our technical knowledge and what our company lives from one to the other newsletter.
According to art. 13 of the general regulation on the protection of personal data of 27 April 2016 (Journal of Laws UE L 119 of 04.05.2016; hereinafter: RODO) informs you that:
The administrator of your Personal Data is P.P.H. WObit E.K.J. Ober s.c., Deborzyce 16, 62-045 Pniewy;
with the Data Protection Inspector, you can contact us at the following e-mail address iod@wobit.com.pl ;
the provided personal data will be processed on the basis of art. 6 par. 1 lit. a) and f) RODO;
Your personal data will be stored until the consent is revoked;
you have the right to request the administrator to access your personal data, the right to rectify it, delete it, limit processing, the right to transfer data, the right to object, the right to withdraw consent;
if it is found that the processing of your personal data violates the provisions of the GDPR, you have the right to lodge a complaint with the Inspector General for Personal Data Protection (after 25 May 2018 - the President of the Office for Personal Data Protection);
providing personal data is voluntary, however, failure to indicate personal data may result in the inability to receive the Newsletter;
Your data will not be stored on servers in a third country / outside of the European economic area;
Your personal data will not be processed in an automated way in the form of profiling on the basis of your consent;
Your data will not be processed in other marketing activities;