
Robots in industry are more and more often everyday, but also necessities, because they allow, among others, to gain a competitive advantage by increasing productivity and improving production quality. WObit proposes Cartesian robots in-house production together with a number of accessories that allow to prepare a solution tailored to the needs of the application.
The version of the most economic is a robot whose design is based on MLA modules . The drive can be a stepper motor, a brush motor and a brushless DC drive as well as a servo drive. Due to the compatibility of profiles with popular connection systems and, as the name suggests, the modular structure, MLA allow designers to develop functional solutions tailored to the requirements of a specific application. The maximum range of motion in one axis is 2500 mm, and the positioning precision available is 0.1 mm.
 | Sterowanie silnikami może być realizowane w różnorodny sposób. Pierwszym z nich jest wykorzystanie modułów MLA ze zintegrowaną elektroniką, które mogą być nadrzędnie sterowane z poziomu sterownika PLC lub panelu HMI. Zamiast sterownika PLC można zastosować nowy kontroler trajektorii MIC488, a zamiast modułów ze zintegrowaną elektroniką moduły MLA- SIC. |
Wherever greater precision is necessary, and there is a need to carry larger loads, the optimal solution is to use MLAS modules with drive transmitted by a ball screw as the basis of the robot. The positioning precision for this type of structure is up to 0.01 mm / 300 mm. The maximum range of motion in one axis is 600 mm. The control of each module can be integrated or closed in the control cabinet.
| Najbardziej dynamiczną wersją jest robot kartezjański, którego konstrukcja bazuje na silnikach ServoTube. Charakteryzuje się wysoką dynamiką – przyspieszeniem do 586 m/s2, prędkości do 10,6 m/s oraz powtarzalnością do 0,012 mm. Sterowanie silnikami realizowane jest poprzez funkcjonalne sterowniki z serii mcDSA, które mogą być kontrolowane nadrzędnie z poziomu sterownika PLC. Dzięki kompaktowej konstrukcji napędów oraz ich doskonałym parametrom możemy przygotować roboty pracujące w układach bramowych jak i aplikacjach wieloosiowych. | 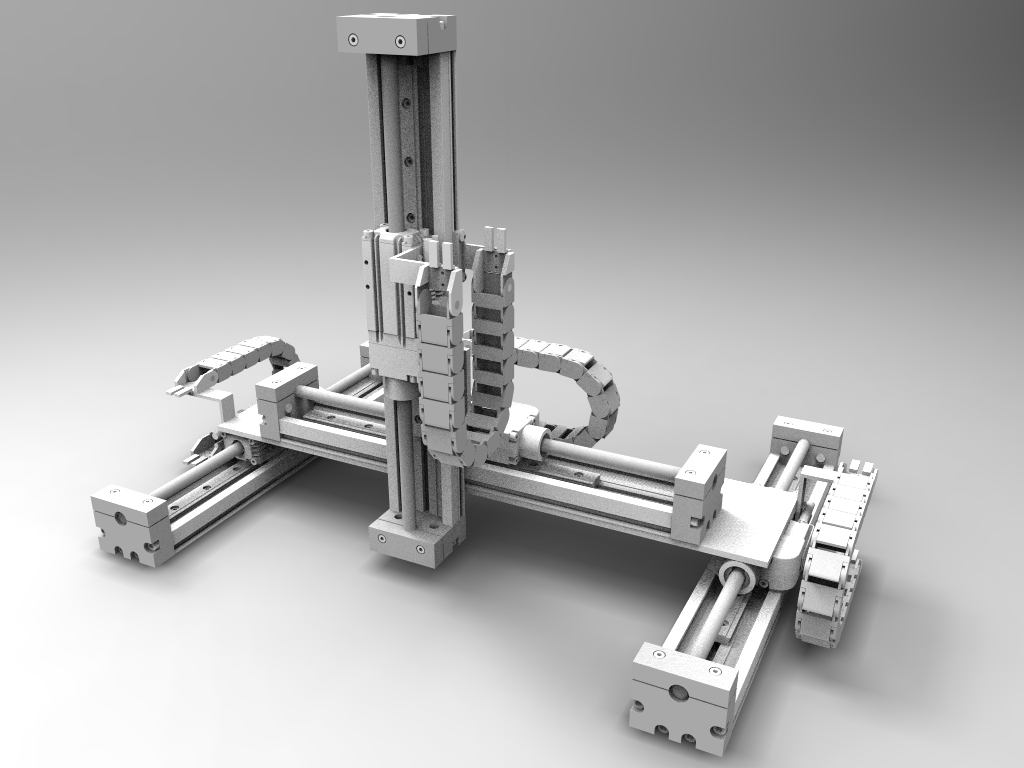 |
Funkcjonalność robota można łatwo rozszerzyć poprzez implementację modułów obrotowych, pracujących zwykle w osi Z. W modułach obrotowych, z oferty WObit, możliwa jest regulacja kąta obrotu do 360°, dostępny jest również model ze zintegrowanym absorberem umożliwiającym płynną pracę nawet przy dużej dynamice. Moduły mają kompaktową, płaską konstrukcję, która pozwala na łatwą integrację w nawet ograniczonej przestrzeni montażowej. Na module można zamontować ANDnp. chwytaki czy elementy pomiarowe takie jak skaner laserowy.
Firma WObit maANDw swojej ofercie przyssawki, chwytaki pneumatyczne i elektryczne, w których przeniesienie napędu jest realizowane w różnorodny sposób. Pod względem układu wykonawczego chwytaki, oferowane przez firmę WObit, można podzielić na dwuszczękowe, trójszczękowe oraz wieloszczękowe, a także chwytaki obrotowe. Są one przystosowane do montażu z różnych stron, a dodatkowym ułatwieniem jest możliwość doprowadzenia medium (powietrza czy przyłącza elektrycznego) z kilku stron korpusu chwytaka.
See our products
 MIC488
MIC488 GED5006N
GED5006N MLAS-SX Linear module with ball screw with AC servo motor
MLAS-SX Linear module with ball screw with AC servo motor MLA-SIC Linear module with stepper motor with built-in controller + RS485
MLA-SIC Linear module with stepper motor with built-in controller + RS485 MLA-KX Rope module with stepper motor
MLA-KX Rope module with stepper motor Class of precision robots
Class of precision robots MLA2P - reinforced and sealed version of the module
MLA2P - reinforced and sealed version of the module The class of economic robots
The class of economic robots PLC K506EA-30AT controller
PLC K506EA-30AT controller A class of robots with high dynamics
A class of robots with high dynamics ScanCONTROL 2900-25 laser scanner
ScanCONTROL 2900-25 laser scanner Two-jaw parallel gripper GPP5003NO-21-A
Two-jaw parallel gripper GPP5003NO-21-A

