
Roboty w przemyśle to coraz częściej codzienność, ale również konieczność, gdyż pozwalają one m.in. na uzyskiwanie przewagi konkurencyjnej poprzez zwiększenie wydajności i podnoszenie jakości produkcji. WObit proponuje roboty kartezjańskie własnej produkcji wraz z szeregiem akcesoriów, pozwalających na przygotowanie rozwiązania dopasowanego do potrzeb aplikacji.
Wersja najbardziej ekonomiczna to robot, którego konstrukcja bazuje na modułach MLA. Jako napęd może być wykorzystany silnik krokowy, silnik szczotkowy i bezszczotkowy prądu stałego oraz serwonapęd. Dzięki zgodności profili z popularnymi systemami łączeniowymi i jak sama nazwa wskazuje budowie modułowej, MLA pozwalają konstruktorom na przygotowywanie funkcjonalnych rozwiązań, dopasowanych do wymagań konkretnej aplikacji. Maksymalny zakres ruchu w jednej osi wynosi 2500 mm, a dostępna precyzja pozycjonowania to 0,1 mm.
 | Sterowanie silnikami może być realizowane w różnorodny sposób. Pierwszym z nich jest wykorzystanie modułów MLA ze zintegrowaną elektroniką, które mogą być nadrzędnie sterowane z poziomu sterownika PLC lub panelu HMI. Zamiast sterownika PLC można zastosować nowy kontroler trajektorii MIC488, a zamiast modułów ze zintegrowaną elektroniką moduły MLA- SIC. |
Tam, gdzie niezbędna jest większa precyzja, a także zachodzi potrzeba przenoszenia większych obciążeń, optymalnym rozwiązaniem jest wykorzystanie modułów MLAS z napędem przenoszonym przez śrubę kulową jako podstawy robota. Precyzja pozycjonowania dla tego typu konstrukcji wynosi do 0,01 mm/300 mm. Maksymalny zakres ruchu w jednej osi to 600 mm. Sterowanie każdego modułu może być zintegrowane lub zamknięte w szafie sterowniczej.
| Najbardziej dynamiczną wersją jest robot kartezjański, którego konstrukcja bazuje na silnikach ServoTube. Charakteryzuje się wysoką dynamiką – przyspieszeniem do 586 m/s2, prędkości do 10,6 m/s oraz powtarzalnością do 0,012 mm. Sterowanie silnikami realizowane jest poprzez funkcjonalne sterowniki z serii mcDSA, które mogą być kontrolowane nadrzędnie z poziomu sterownika PLC. Dzięki kompaktowej konstrukcji napędów oraz ich doskonałym parametrom możemy przygotować roboty pracujące w układach bramowych jak i aplikacjach wieloosiowych. | 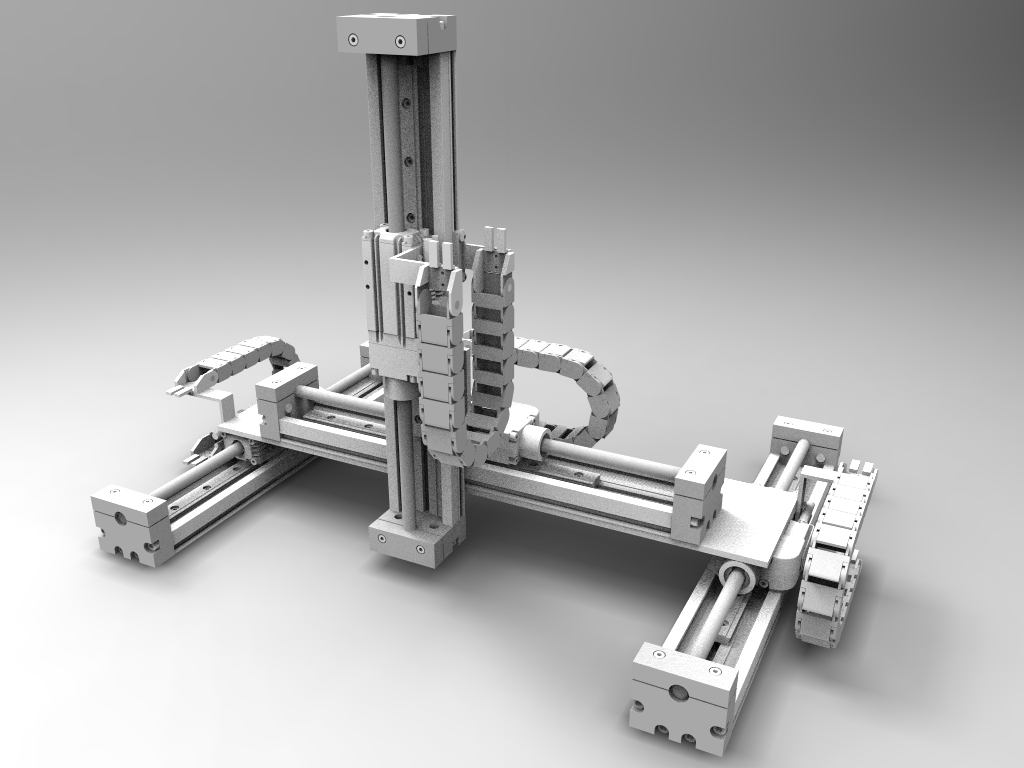 |
Funkcjonalność robota można łatwo rozszerzyć poprzez implementację modułów obrotowych, pracujących zwykle w osi Z. W modułach obrotowych, z oferty WObit, możliwa jest regulacja kąta obrotu do 360°, dostępny jest również model ze zintegrowanym absorberem umożliwiającym płynną pracę nawet przy dużej dynamice. Moduły mają kompaktową, płaską konstrukcję, która pozwala na łatwą integrację w nawet ograniczonej przestrzeni montażowej. Na module można zamontować np. chwytaki czy elementy pomiarowe takie jak skaner laserowy.
Firma WObit ma w swojej ofercie przyssawki, chwytaki pneumatyczne i elektryczne, w których przeniesienie napędu jest realizowane w różnorodny sposób. Pod względem układu wykonawczego chwytaki, oferowane przez firmę WObit, można podzielić na dwuszczękowe, trójszczękowe oraz wieloszczękowe, a także chwytaki obrotowe. Są one przystosowane do montażu z różnych stron, a dodatkowym ułatwieniem jest możliwość doprowadzenia medium (powietrza czy przyłącza elektrycznego) z kilku stron korpusu chwytaka.
Zobacz nasze produkty
 MLA2P - wzmocniona i uszczelniona wersja modułu
MLA2P - wzmocniona i uszczelniona wersja modułu Precyzyjne roboty kartezjańskie
Precyzyjne roboty kartezjańskie MIC488 - Programowalny kontroler ruchu dla 4 osi
MIC488 - Programowalny kontroler ruchu dla 4 osi Chwytak dwuszczękowy równoległy GPP5003NO-21-A
Chwytak dwuszczękowy równoległy GPP5003NO-21-A Sterownik PLC K506EA-30AT
Sterownik PLC K506EA-30AT GED5006N
GED5006N MLAS-SX Moduł liniowy ze śrubą kulową z serwomotorem prądu przemiennego
MLAS-SX Moduł liniowy ze śrubą kulową z serwomotorem prądu przemiennego MLA-KX Moduł linowy z silnikiem krokowym
MLA-KX Moduł linowy z silnikiem krokowym Roboty kartezjańskie o wysokiej dynamice
Roboty kartezjańskie o wysokiej dynamice Skaner laserowy scanCONTROL 2900-25
Skaner laserowy scanCONTROL 2900-25 MLA-SIC Moduł liniowy z silnikiem krokowym z wbudowanym kontrolerem + RS485
MLA-SIC Moduł liniowy z silnikiem krokowym z wbudowanym kontrolerem + RS485 Ekonomiczne roboty kartezjańskie
Ekonomiczne roboty kartezjańskie

