
W automatyce przemysłowej, pakowaniu, ale również w innych dziedzinach jak np. fotografia często wykorzystywany jest ruch liniowy. Różnego rodzaju napędy, prowadnice czy śruby pozwalają na uzyskiwanie dynamicznych, a przy tym bardzo precyzyjnych przemieszczeń. Kompleksową propozycją firmy WObit jest moduł MLA stanowiący kompletne rozwiązanie do realizacji przemieszczeń liniowych.
Moduły liniowe MLA zbudowane są na dedykowanym profilu aluminiowym, prowadnicy z szyną profilową, po której toczy się wózek napędzany paskiem zębatym (MLA) lub śrubą kulową (MLAS). Zastosowane w module prowadnice pozwalają na uzyskanie prędkości maksymalnej do 4 m/s oraz dokładności pozycjonowania do 0,1 mm. Moduły w zależności od potrzeb mogą być napędzane silnikiem krokowym, DC lub BLDC a od niedawna także serwonapędem.
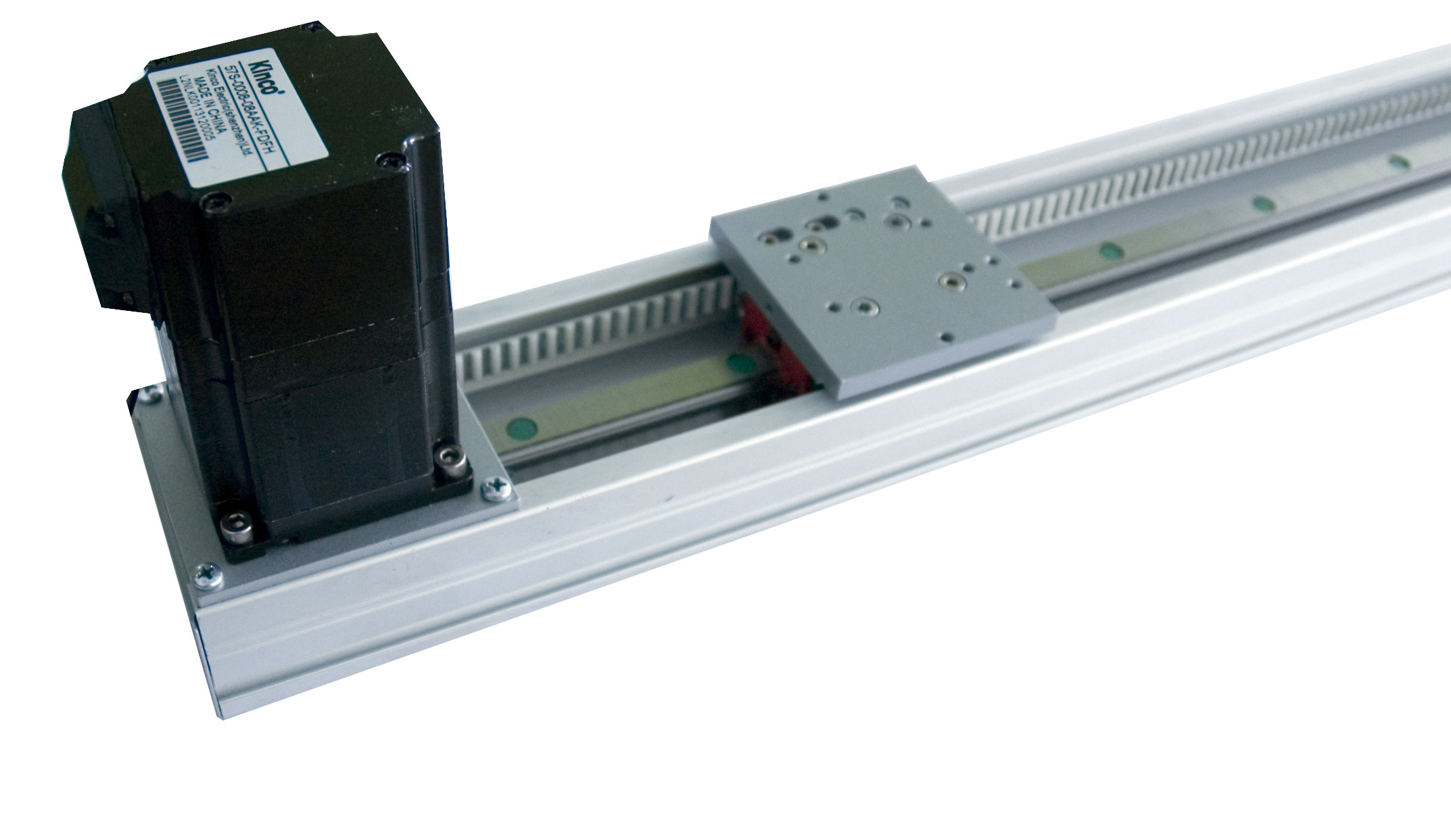
Moduł MLA w wersji standardowej napędzany jest silnikiem krokowym, co umożliwia sterowanie w otwartej pętli (bez konieczności stosowania drugiego czujnika położenia). Rozszerzeniem tego jest wersja z zamontowanym sterownikiem silnika krokowego z interfejsem KROK/KIERUNEK. Sterownik umożliwia sterowanie silnikiem krokowym o prądzie do 4 A i podziale kroku do 1/64, co pozwala na precyzyjną kontrolę wózka modułu z rozdzielczością nawet do 0,1mm.
| Zamiast zwykłego sterownika MLA silnikiem krokowym można wybrać wersję z wbudowanym kontrolerem ruchu z możliwością programowania i sterowania przez magistralę RS485 Modbus-RTU (MLA-SIC). Kontroler umożliwia ustalenie dowolnej trajektorii ruchu wózka oraz realizacji programów ruchu zaprogramowanych przez użytkownika. Moduł MLA-SIC może być dodatkowo wyposażony w zintegrowany enkoder absolutny, który służy do nadrzędnej kontroli pozycji napędu oraz zapamiętywania pozycji w razie utraty zasilania. Kontroler posiada także uniwersalne wejścia i wyjścia pozwalające na reakcję modułu na zdarzenia zewnętrzne lub sterowanie zewnętrznymi urządzeniami. Do programowania i konfigurowania urządzenia dostępna jest aplikacja SIC-KONFIGURATOR, która poprzez złącze USB pozwala w łatwy sposób konfigurować parametry pracy modułu oraz przetestować parametry ruchu. Dodatkowe oprogramowanie ML-PROG umożliwia stworzenie programów ruchu do samodzielnej pracy modułu. | 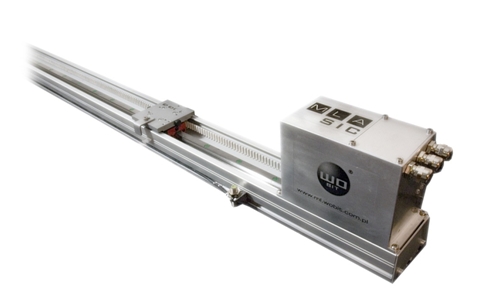 |
Poza silnikiem krokowym MLA może być napędzany silnikiem szczotkowym firmy Buehler Motor (model 1.61.050.xxx) z przekładnią. W zależności od modelu silnik może być zasilany napięciem 12 V lub 24 V, natomiast dostępne modele przekładni silnika umożliwiają osiągnięcie momentu od 15 Nm i prędkości 1,1 m/s (przełożenie 6,3) do 200 N i prędkości 0,035 m/s (przełożenie 377). Moduł wyposażony w silnik DC charakteryzuje się bardzo wysoką kulturą pracy. Dzięki specyfice działania silnika DC wózek modułu porusza się bardzo płynnie i cicho. Z tego względu jest chętnie stosowany w takich aplikacjach jak urządzenia medyczne, fotografia – np. do wykonywania zdjęć metodą poklatkową, reklama czy też inne, które wymagają wymienionych wcześniej cech. Zarówno silnik DC jak i moduł może zostać wyposażony w enkoder, który umożliwi kontrolę pozycji oraz dokładną kontrolę prędkości przesuwu. Zastosowanie silnika z enkoderem zwiększa, przy tej samej rozdzielczości enkodera, rozdzielczość pozycjonowania układu multiplikując ją poprzez przełożenie przekładni.
Innym wykonaniem, które również charakteryzuje się wysoką kulturą pracy jest napęd BLDC. Wraz z modułem dostępne są zarówno napędy posiadające zintegrowaną elektronikę, jak i takie, które wymagają zewnętrznego sterowania. Zintegrowana elektronika dostępna jest w kilku wersjach i umożliwia kontrolę napędu za pomocą wejścia analogowego lub magistrali sieciowej. Warto podkreślić, że moduł w tym wykonaniu przeznaczony jest do pracy ciągłej. Dynamika oraz osiągane obciążenia maksymalne są większe niż te, które oferuje zestaw wyposażony w silnik krokowy, przy zachowaniu możliwości precyzyjnego pozycjonowania napędu.
 | Najdynamiczniejszą wersją modułu liniowego, która pozwala na przenoszenie znacznych obciążeń jest MLA z silnikiem serwo. Serwonapęd pozwala także na łatwą integrację modułu w maszynach wyposażonych w takiego typu jednostki napędowe. Dzięki zintegrowanemu enkoderowi o rozdzielczości 2500 impulsów na obrót, użytkownik uzyskuje możliwość precyzyjnej kontroli pozycji. Silnik serwo może być montowany na module w sposób bezpośredni oraz poprzez przekładnię planetarną prostą lub kątową. Wraz z modułami liniowymi dostępne są silniki serwo o mocach od 80 do 400 W. Dodatkowo można je wyposażyć w hamulec zabezpieczający układ liniowy w pozycji pionowej podczas utraty napięcia zasilania. |
Do aplikacji, w których tylko sporadycznie zachodzi potrzeba zmiany pozycji został przygotowany moduł liniowy o napędzie ręcznym, wyposażony w specjalną korbę umożliwiającą łatwe pozycjonowanie wózka. Zestaw taki może być dodatkowo wyposażony w enkoder oraz licznik z wyświetlaczem określający położenie wózka.
Moduły liniowe MLAS oparte są na bazie profilu aluminiowego, prowadnicy liniowej i śruby kulowej. Zastosowanie śruby kulowej pozwala na przenoszenie bardzo dużych sił (do 1000 N) oraz zapewnia sporą precyzję ruchu, umożliwiającą ustalenie położenia z dokładnością do setnych części mm. Podobnie jak wersja napędzana paskiem zębatym w MLAS można zastosować silnik krokowy, silnik DC, BLDC oraz serwonapęd.
| Dzięki modułowej strukturze oraz dostępności różnorodnych akcesoriów MLA/MLAS może być łatwo dostosowywany do potrzeb klienta, np. poprzez dodatkowe uszczelnienie chroniące mechanizm napędowy przed zabrudzeniem. Kompatybilność profilu MLA/MLAS z innymi systemami profilowymi sprawia że moduły liniowe stanowią łatwe i ekonomiczne rozwiązanie służące do budowy wieloosiowych systemów X/Y/Z. Roboty kartezjańskie zbudowane na bazie modułu MLA/MLAS umożliwiają realizację zarówno aplikacji wykonawczych, jak i testowych czy pomiarowych. |  |
Przykładem takiej konstrukcji może być prosty skaner laserowy, do budowy którego wystarczy wykorzystać punktowy czujnik laserowy drogi oraz trzy moduły liniowe MLA, z czego przynajmniej dwa muszą być aktywne tzn. mieć silnik i element przenoszący napęd (istnieje możliwość zamówienia modułów pasywnych, przede wszystkim do realizacji funkcji podporowej). Inną ciekawym zastosowaniem modułu MLA jest aplikacja cięcia np. folii. W tym przypadku należy zastosować napęd z enkoderem zliczającym drogę oraz sterownik PLC do kontroli całego układu. Po wykonaniu zaprogramowanej drogi przez silnik enkoder wyśle informację do sterownika PLC, a stamtąd sygnał zostanie przesłany do noża zamontowanego na wózku, który wykona cięcie.
Aby dopasować rozwiązanie idealne dla siebie oraz uzyskać więcej informacji zapraszamy do kontaktu ze specjalistami pod numerem 61 22 27 422 oraz na stronę www.wobit.com.pl.
Zobacz nasze produkty
 SMH80S-0075 silnik serwo
SMH80S-0075 silnik serwo Silnik DC z przekładnią 1.61.050.446
Silnik DC z przekładnią 1.61.050.446 MLA2P - wzmocniona i uszczelniona wersja modułu
MLA2P - wzmocniona i uszczelniona wersja modułu SIC184 v.2 - serwo-sterownik silnika krokowego
SIC184 v.2 - serwo-sterownik silnika krokowego MIC488 - Programowalny kontroler ruchu dla 4 osi
MIC488 - Programowalny kontroler ruchu dla 4 osi MLA-SIC Moduł liniowy z silnikiem krokowym z wbudowanym kontrolerem + RS485
MLA-SIC Moduł liniowy z silnikiem krokowym z wbudowanym kontrolerem + RS485 Ekonomiczne roboty kartezjańskie
Ekonomiczne roboty kartezjańskie MLA-KX Moduł linowy z silnikiem krokowym
MLA-KX Moduł linowy z silnikiem krokowym MLAS-SX Moduł liniowy ze śrubą kulową z serwomotorem prądu przemiennego
MLAS-SX Moduł liniowy ze śrubą kulową z serwomotorem prądu przemiennego

